
Next-Gen Ankle Rehab: Three-Axis Precision for Full-Range Recovery

Rehabilitation after knee or ankle injury, whether from sports trauma, stroke, or degenerative conditions, demands precise, repeatable movement that matches the body’s natural biomechanics. Too little assistance leaves patients struggling; too much creates dependency or unnatural stress. Robotic exoskeletons aim to bridge that gap, delivering controlled torque and multi-plane motion while adapting to individual anatomy.
At Nazarbayev University’s Center for Excellence in Medical Robotics and Rehabilitation (CEMRR), engineers have developed two prototypes that target the ankle and knee with high degrees of freedom, adjustable alignment, and clinically relevant torque. Both designs prioritize biomechanical fidelity, patient comfort, and ease of setup key for real-world clinical use.
Ankle Exoskeleton: Three-Axis Precision for Full-Range Recovery
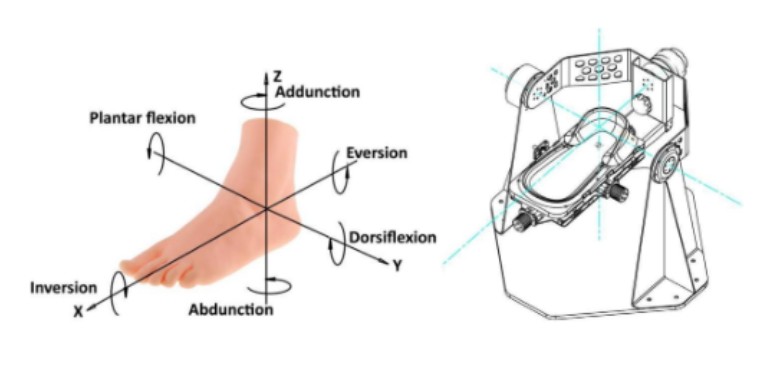
The ankle device is built around a patient’s foot secured to a three-axis adjustable insole mounted on an L-shaped platform. Three brushless DC (BLDC) motors independently drive motion in the sagittal (dorsiflexion/plantarflexion), frontal (inversion/eversion), and transverse (adduction/abduction) planes.
Key ranges match or encompass physiological limits:
Dorsiflexion 0–30° and plantarflexion 0–50° (sagittal)
Inversion/eversion 0–25° (frontal)
Adduction/abduction 0–40° (transverse)
These allow passive stretching, active-assisted exercises, and resisted strengthening crucial in early recovery phases and for restoring proprioception after sprains or fractures.
What sets the design apart is its anthropometric adjustability. The insole can shift 5.5 cm along X (mediolateral), 4.0 cm along Y (anteroposterior), and 3.0 cm along Z (vertical). Fine-threaded screws and bolt-groove mechanisms enable smooth, lockable positioning. This alignment ensures the device’s virtual rotation axis coincides with the patient’s anatomical ankle center, eliminating parasitic shear forces, reducing joint stress, and improving torque-sensor accuracy for outcome tracking.
The frame uses 3 mm St3 steel sheet with strategic bends and hexagonal perforations for weight reduction and cable management. The polymer insole (future versions will be 3D-printed custom) slides on grooved carriages. Coaxial motor mounting on sidewalls minimizes play and simplifies servicing. The result is a rigid, stable platform that feels secure yet adaptable to adult foot sizes and shapes.

Smart Control: Bringing the Ankle Exoskeleton to Life
Precise hardware is only half the story. The real intelligence lies in the controllers that translate clinical intent into smooth, safe motion.
The coordinate system is anatomically aligned:
Y-axis: mediolateral (across the foot)
X-axis: anteroposterior (heel to toe)
Z-axis: vertical (bottom to top)
This setup maps directly to standard biomechanical conventions:
Rotation about Y → plantarflexion/dorsiflexion
Rotation about X → inversion/eversion
Rotation about Z → adduction/abduction
By matching the device’s axes to the ankle’s natural ones, the team created a clean mathematical foundation for control. Forward/inverse kinematics, torque calculations, and closed-loop feedback become straightforward. Experimental data can be directly compared to literature norms, and clinicians can prescribe movements in familiar anatomical terms.
The assembled prototype mirrors the CAD model exactly. Photos reveal the L-shaped platform, sliding X/Y platforms, upright posts, base, and compact flange-mounted drives. Cables are neatly routed along perforations, keeping the system tidy and serviceable. The movable insole glides smoothly along all three axes, confirming the adjustment mechanism works as intended in real hardware.
These images aren’t just documentation—they validate the entire design loop: from simulation to fabrication to physical realization. The ergonomics look practical for clinical settings—compact footprint, accessible knobs, and clear visual feedback on alignment.

Choosing the Right Muscle: Knee Actuator Selection
For the knee exoskeleton, the critical decision is the actuator—the “muscle” that powers flexion and extension. Biomechanical data show adult men require ~35 Nm for natural knee motion; women ~20 Nm. Peak loads during startup, resistance, or added weight can spike much higher.
After evaluating options, the team selected the CubeMars AK80-64 KV80:
Nominal torque: ~48 Nm
Peak torque: up to 120 Nm
Speed: ~40 rpm (close to natural knee velocity)
Weight: ~850 g
This motor exceeds minimum requirements, handles overloads comfortably, and keeps the exoskeleton lightweight for wearable or semi-stationary use. Its smooth, controlled output supports compliant, physiologically natural trajectories—vital for patient trust and motor relearning.
The AK10-9 V3.0 (18 Nm nominal, 53 Nm peak) was considered for lighter applications, but the AK80-64’s higher margin makes it the better choice for comprehensive rehab, especially in patients with weakness, spasticity, or post-surgical restrictions.
Why This Matters for Recovery
Precise axis alignment and multi-plane control allow truly personalized protocols: gradual range increases for stiff joints, resisted strengthening for muscle rebuilding, or perturbation-like challenges for balance. Repeatable movements generate reliable data for clinicians and researchers, tracking torque, position, and progress over sessions.
These prototypes are more than hardware. They reflect a shift toward devices that respect individual anatomy, minimize secondary injury risk, and scale from clinic to potential home use. With ongoing integration of sensors (torque, position, IMUs) and adaptive control algorithms, the next iterations could offer closed-loop assistance that “learns” the patient’s recovery curve.
In Kazakhstan and beyond, where access to specialized rehab can be limited, such exoskeletons promise to democratize high-quality joint therapy, delivering consistent, biomechanically sound support when human hands alone cannot keep pace. The ankle and knee prototypes at CEMRR are early steps, but they point toward a future where recovery is as precise as the machines that guide it