
Голеностоп: реабилитация нового поколения — трёхосевая точность, полный объём движений

Реабилитация после травм колена или голеностопа — будь то спортивная травма, инсульт или дегенеративные состояния — требует точных, воспроизводимых движений, соответствующих естественной биомеханике тела. Слишком малая помощь оставляет пациента в постоянной борьбе; чрезмерная — формирует зависимость или создаёт неестественную нагрузку. Роботизированные экзоскелеты призваны закрыть этот разрыв, обеспечивая контролируемый крутящий момент и движение в нескольких плоскостях с адаптацией под индивидуальную анатомию.
В Центре передового опыта в области медицинской робототехники и реабилитации (CEMRR) Назарбаев Университета инженеры разработали два прототипа для голеностопа и колена — с высокой степенью свободы, регулируемой соосностью и клинически значимым моментом. Оба решения делают акцент на биомеханической точности, комфорте пациента и простоте настройки — ключевых требованиях для реального клинического применения.

Экзоскелет голеностопа: трёхосевая точность для восстановления полного диапазона движений
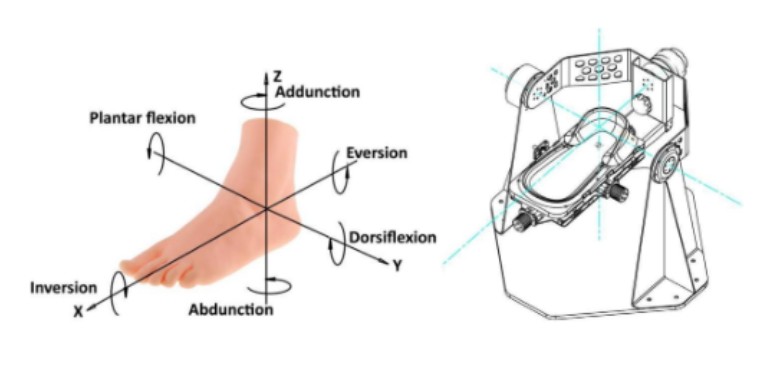
Голеностопное устройство построено вокруг стопы пациента, зафиксированной на трёхосевой регулируемой стельке, установленной на L-образной платформе. Три бесщёточных DC-мотора (BLDC) независимо обеспечивают движение в сагиттальной (дорсифлексия/плантарная флексия), фронтальной (инверсия/эверсия) и поперечной (аддукция/абдукция) плоскостях.
Ключевые диапазоны соответствуют или перекрывают физиологические пределы:
дорсифлексия 0–30° и плантарная флексия 0–50° (сагиттальная)
инверсия/эверсия 0–25° (фронтальная)
аддукция/абдукция 0–40° (поперечная)
Эти режимы позволяют выполнять пассивное растяжение, упражнения с активной поддержкой и силовую работу с сопротивлением — критически важные в ранние сроки восстановления и для возвращения проприоцепции после растяжений или переломов.
Отличительная особенность конструкции — антропометрическая регулируемость. Стелька может смещаться на 5,5 см по оси X (медиолатерально), на 4,0 см по оси Y (переднезадне) и на 3,0 см по оси Z (вертикально). Винты с мелкой резьбой и механизмы «болт-паз» обеспечивают плавную настройку с фиксацией. Такое выравнивание позволяет виртуальной оси вращения устройства совпадать с анатомическим центром голеностопного сустава, устраняя паразитные сдвиговые усилия, снижая стресс на сустав и повышая точность датчика момента для отслеживания результатов.
Рама выполнена из стального листа St3 толщиной 3 мм с продуманными гибами и шестигранными перфорациями для снижения массы и удобной укладки кабелей. Полимерная стелька (в будущих версиях — индивидуальная, напечатанная на 3D-принтере) перемещается по кареткам с пазами. Коаксиальное крепление моторов на боковых стенках уменьшает люфты и упрощает обслуживание. В итоге получается жёсткая, стабильная платформа, которая ощущается надёжной, но при этом адаптируется под размеры и форму стопы взрослого человека.
Умное управление: как «оживает» экзоскелет голеностопа
Точная механика — лишь половина решения. Главная «интеллектуальность» — в контроллерах, которые переводят клиническую задачу в плавное и безопасное движение.
Система координат согласована с анатомией:
ось Y: медиолатеральная (поперёк стопы)
ось X: переднезадняя (от пятки к носку)
ось Z: вертикальная (снизу вверх)
Это напрямую соответствует стандартным биомеханическим определениям:
вращение вокруг Y → плантарная флексия/дорсифлексия
вращение вокруг X → инверсия/эверсия
вращение вокруг Z → аддукция/абдукция
Сопоставив оси устройства с естественными осями голеностопа, команда получила «чистую» математическую основу для управления. Прямые/обратные кинематические расчёты, вычисление момента и замкнутая обратная связь становятся проще. Экспериментальные данные можно напрямую сравнивать с нормами из литературы, а клиницисты могут назначать движения привычными анатомическими терминами.
Собранный прототип точно повторяет CAD-модель. На фотографиях видны L-образная платформа, подвижные X/Y-платформы, стойки, основание и компактные фланцевые приводы. Кабели аккуратно уложены по перфорациям, что делает систему опрятной и удобной в обслуживании. Подвижная стелька плавно скользит по всем трём осям, подтверждая работоспособность механизма регулировки в реальном устройстве.
Эти изображения — не просто документация: они подтверждают весь цикл разработки — от симуляции к изготовлению и физической реализации. Эргономика выглядит практичной для клиники: компактные габариты, доступные элементы регулировки и понятная визуальная обратная связь по выравниванию.

Выбор «мышцы»: подбор привода для коленного экзоскелета
Для коленного экзоскелета ключевое решение — выбор привода, то есть «мышцы», обеспечивающей сгибание и разгибание. Биомеханические данные показывают, что взрослым мужчинам для естественного движения колена требуется около 35 Н·м, женщинам — около 20 Н·м. Пиковые нагрузки при старте, сопротивлении или дополнительном весе могут быть существенно выше.
После оценки вариантов команда выбрала CubeMars AK80-64 KV80:
номинальный момент: ~48 Н·м
пиковый момент: до 120 Н·м
скорость: ~40 об/мин (близко к естественной скорости колена)
масса: ~850 г
Этот мотор превышает минимальные требования, уверенно переносит перегрузки и сохраняет экзоскелет относительно лёгким для носимого или полустационарного использования. Плавная, контролируемая отдача поддерживает податливые, физиологически естественные траектории — что важно для доверия пациента и восстановления моторных навыков.
Рассматривался AK10-9 V3.0 (18 Н·м номинально, 53 Н·м пиково) для более лёгких задач, однако запас по мощности AK80-64 делает его более подходящим для комплексной реабилитации, особенно у пациентов со слабостью, спастичностью или послеоперационными ограничениями.
Почему это важно для восстановления
Точная соосность и управление движением в нескольких плоскостях позволяют создавать действительно персонализированные протоколы: постепенное увеличение амплитуды при тугоподвижности, силовые упражнения с сопротивлением для восстановления мышц или «возмущающие» нагрузки для тренировки баланса. Воспроизводимые движения дают надёжные данные для врачей и исследователей, позволяя отслеживать момент, положение и прогресс от сеанса к сеансу.
Эти прототипы — больше, чем железо. Они отражают переход к устройствам, которые учитывают индивидуальную анатомию, снижают риск вторичных повреждений и масштабируются от клиники к потенциальному домашнему применению. По мере интеграции датчиков (момент, положение, IMU) и адаптивных алгоритмов управления следующие версии смогут обеспечивать замкнутую поддержку, которая «подстраивается» под кривую восстановления пациента.
В Казахстане и за его пределами, где доступ к специализированной реабилитации может быть ограничен, такие экзоскелеты способны сделать качественную суставную терапию более доступной, обеспечивая стабильную, биомеханически корректную поддержку тогда, когда одних человеческих рук недостаточно. Прототипы голеностопа и колена в CEMRR — ранние шаги, но они указывают на будущее, где восстановление будет столь же точным, как и машины, которые его направляют.