
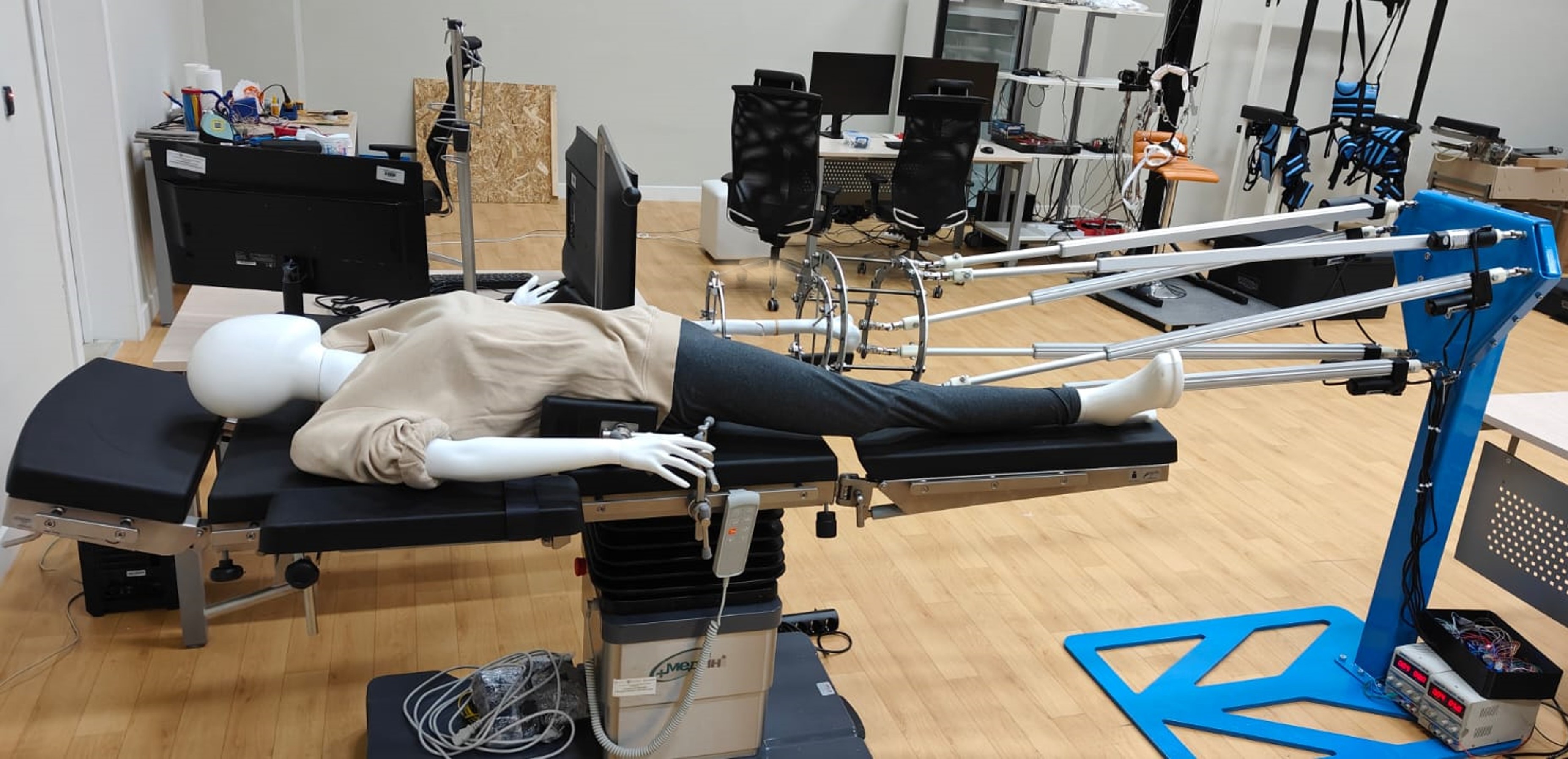
R.ALFRED: автономная репозиция переломов бедренной кости Процедура, где нужны и сила, и точность
Репозиция переломов бедренной кости — одна из наиболее физически тяжёлых задач в ортопедии. Хирургам необходимо прикладывать значительное вытяжение, чтобы преодолеть мощное противодействие мышц и сопоставить фрагменты длинной кости перед фиксацией пластинами или интрамедуллярными штифтами. Даже в руках опытных специалистов идеальное сопоставление с первой попытки не всегда возможно — часто требуются повторные корректировки. При этом и пациент, и операционная команда нередко длительное время работают под флюороскопией, что увеличивает суммарное облучение рентгеновским излучением.
Эти факторы — большие силы, жёсткие требования к точности и «радиационно-нагруженный» рабочий процесс — делают репозицию бедра перспективной задачей для роботизации. Но есть важное условие: робот должен быть одновременно и точным, и «податливым» (комплаентным). Высокая точность нужна для выравнивания, а высокая комплаентность — для безопасного взаимодействия с системой «кость–мышцы».

Идея R.ALFRED
R.ALFRED (Autonomous Reduction of Femur Fractures) предлагается как роботизированная система, которая помогает ортопедической команде в трудоёмкой репозиции бедра и снижает время работы в условиях, где требуется рентген-контроль. В основе решения — параллельный робот с шестью степенями свободы, созданный не только «для силы», а для контролируемой, безопасной и адаптивной репозиции.
В отличие от традиционных жёстких приводов на сервоприводах/DC-моторах, которые часто дают высокую жёсткость на конце эффектора, R.ALFRED использует шесть внутренне комплаентных (изначально упругих) приводов. Это принципиальный выбор: комплаентность заложена в механику, что снижает риск опасных контактных усилий, сохраняя способность создавать необходимое вытяжение для выравнивания длинной кости.
Проектирование под конкурирующие требования
Робот для репозиции бедра должен одновременно:
обеспечивать высокую кинематическую точность движения;
эффективно передавать усилия при разумных нагрузках на приводы;
сохранять комплаентность взаимодействия для безопасности.
Чтобы сбалансировать эти компромиссы, в работе введены три метрики эффективности:
Conditioning Index — показатель, связанный с точностью движения и стабильной передачей сил/моментов (улучшенный вариант, согласованный с глобальными концепциями обусловленности в параллельной робототехнике).
Actuator Force Index — отражает, насколько «тяжело» приходится приводам в разных режимах работы.
Interaction Compliance Index — характеризует способность робота безопасно взаимодействовать с опорно-мышечной системой.
С использованием этих метрик команда применила многоцелевой эволюционный алгоритм оптимизации SPEA2, чтобы исследовать геометрическое пространство конструкции. Варьируя ключевые параметры, оптимизация дала конфигурацию, представляющую наилучший практический баланс между точностью, нагрузкой на приводы и комплаентностью.
Доказательство концепции: управление и точность траектории
После получения оптимизированной конструкции проект перешёл к первичной валидации. Робота протестировали на точность следования траектории, сфокусировавшись на управляемых вращательных движениях вокруг трёх осей. Для отслеживания синусоидальных команд был реализован замкнутый контур управления на основе нечёткой логики.
Результат — отличное следование траектории, что подтверждает способность платформы надёжно выполнять заданные движения — важный базовый шаг перед переходом к более высокому уровню автономности и стратегиям репозиции с контролем силы/комплаентности.
Следующий этап развития R.ALFRED
R.ALFRED учитывает клиническую реальность: репозиция зависит от анатомии, типа перелома и меняющихся сил взаимодействия. Следующий этап — переход от управляемого движения к автономности под контролем хирурга и на основе сенсоров:
Визуальное сервоуправление и интеграция с визуализацией: использование 2D рентген-изображений для восстановления практичной 3D-модели перелома для навигации и проверки.
Биомеханическое моделирование: построение оптимальной траектории репозиции, минимизирующей ошибку и учитывающей физиологические ограничения.
Управление с учётом силы/комплаентности: переход от чистого позиционного управления к стратегиям, адаптирующимся по обратной связи «кость–мышцы».
Оптическое стереоскопическое отслеживание: установка стереосистемы зрения для отслеживания положения/ориентации подвижной платформы в реальном времени и автоматической генерации траекторий по текущему состоянию.
Удалённое сопровождение: возможность для хирурга контролировать репозицию при меньшем воздействии излучения.

R.ALFRED отражает направление ортопедической робототехники нового поколения: это не просто автоматизация, а безопасная автономность, где комплаентность, точность и адаптивное управление работают вместе. При успешной реализации система может заменить ручные процессы с вытяжным столом на подход, который воспроизводим, измерим и менее тяжёл физически и радиологически для операционных команд.
Благодарность (клинический вклад): в работе отмечены клинические консультации по процедурам репозиции переломов, полученные от Dr. Brendan Klar (Canberra National Capital Private Hospital, Австралия).
