
Коммуникативная реабилитация детей с ДЦП с помощью QTrobot и мобильного аватара Интервенции QTrobot в NCCR
Детскую реабилитацию часто обсуждают через призму ходьбы и восстановления моторики, однако для многих детей с двигательными нарушениями (MMD) прогресс зависит и от того, что происходит за пределами движения: управление вниманием, взаимная коммуникация, выражение эмоций и уверенность в социальном взаимодействии. Именно здесь социальная робототехника становится чем-то большим, чем просто «новинка». В структурированной клинической среде гуманоидный робот может проводить стабильные и повторяемые сценарии взаимодействия, а терапевты — наблюдать, поддерживать и фиксировать изменения с той детализацией, которую трудно долго сохранять в полностью «ручных» занятиях.
В Национальном центре детской реабилитации (NCCR) в Астане, в рамках более широкого проекта CEMRR, был проведён пилотный этап для оценки реализуемости, приемлемости и предварительной эффективности социально-когнитивных интервенций на базе QTrobot, проводимых на казахском и русском языках.
Робот, который не устаёт
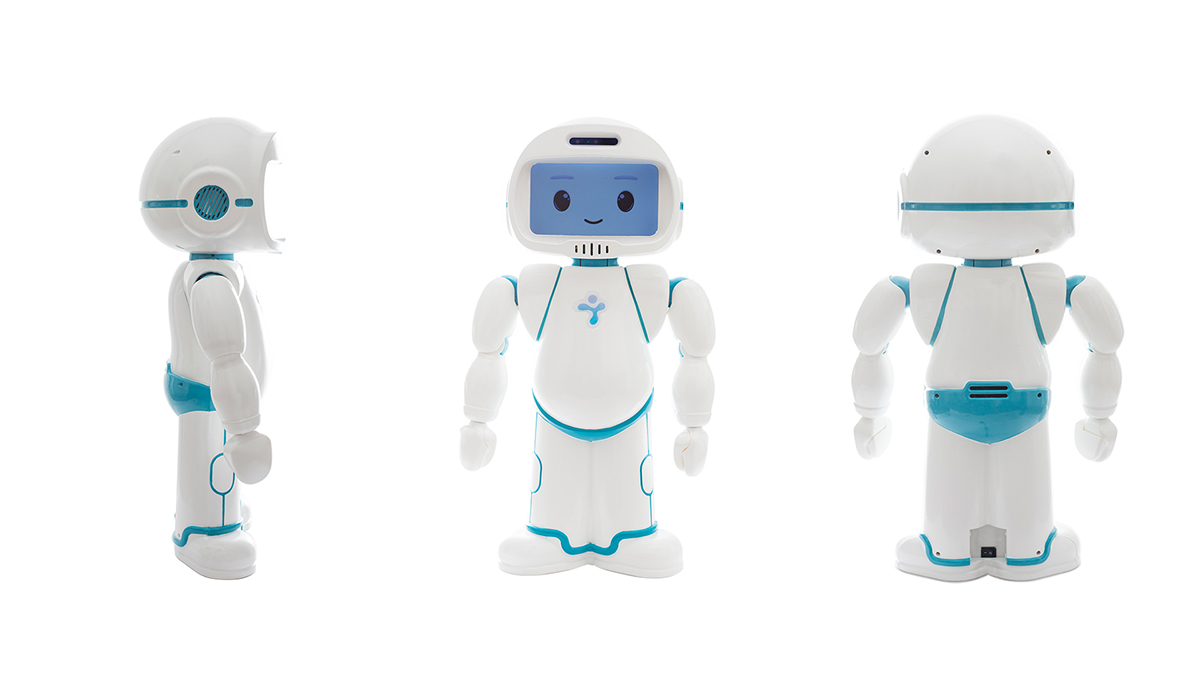
Представьте небольшого выразительного гуманоидного робота, сидящего напротив семилетнего ребёнка в тихом терапевтическом кабинете в Астане. Робот улыбается, машет рукой и на идеальном казахском говорит: «Привет! Меня зовут QTrobot. Как тебя зовут?» Ребёнок немного колеблется, затем отвечает. Через несколько минут они по очереди называют эмоции по ярким карточкам, повторяют смешные выражения лица или участвуют в коротком рассказе. За робота не говорит терапевт — диалог идёт естественно, а за кулисами им управляет ИИ.
Это не сцена из научной фантастики. Это происходит прямо сейчас в NCCR, где исследователи Назарбаев Университета превратили QTrobot — коммерчески доступного социального робота — в двуязычного, усиленного ИИ партнёра для детей с детским церебральным параличом (ДЦП) и другими двигательными нарушениями.
ДЦП часто сопровождается моторными трудностями, но многие дети сталкиваются и с барьерами в социальной коммуникации: распознавание эмоций, очередность в разговоре, самовыражение или удержание внимания. Традиционная терапия опирается на индивидуальные занятия с логопедами или психологами — это эффективно, но может быть однообразным и сильно зависеть от специалиста. Социальная робототехника предлагает другое: стабильное, терпеливое и бесконечно повторяемое взаимодействие, которое не устаёт и не оценивает.

Пилотная программа и измеримые улучшения
В недавнем пилоте в NCCR 20 детей 7–10 лет (подгруппа из более широкой выборки 5–12-летних с лёгкими/умеренными двигательными нарушениями, уровни GMFCS I–III) прошли структурированную трёхнедельную программу. Каждый ребёнок занимался с QTrobot индивидуально: десять сессий по 20–30 минут. Родители дали информированное согласие на казахском или русском; дети — согласие (assent), где это было возможно. Терапевты присутствовали на каждом занятии для безопасности и поддержки, особенно у детей с низким уровнем речевых навыков.
Команда разработала десять двуязычных сценариев, направленных на ключевые социально-когнитивные навыки:
приветствие и начало разговора
очередность и умение ждать
распознавание и называние эмоций
имитация жестов и выражений лица
направленное сторителлинг-взаимодействие и развитие перспективного мышления
QTrobot проводил занятия через речь, анимированную мимику, жесты руками и дружелюбный голос. Для детей, которые говорили мало или не говорили вовсе, робот адаптировался — использовал больше визуальных подсказок, более простые инструкции или увеличивал время ожидания ответа.
Измеряя когнитивные изменения: WISC-V и не только
По шкале интеллекта Векслера для детей (WISC-V) интервенционная группа (сессии с QTrobot) в среднем прибавила 7 баллов по общему показателю интеллекта (FSIQ) за три недели — более чем вдвое больше, чем умеренный прирост в 3 балла в контрольной группе, которая получала сопоставимые занятия по социальным навыкам с терапевтом, но без робота. Тенденции по шкале социальной отзывчивости (SRS) также чаще были в пользу «робот-группы», показывая улучшения в социальной осведомлённости и коммуникации.
Это не «скачок на десятки пунктов», но в детской реабилитации важны и небольшие сдвиги: ребёнок, который избегал зрительного контакта, начинает первым здороваться; ребёнок, которому было трудно соблюдать очередность, начинает ждать и отвечать спонтанно. Терапевты отмечали рост самостоятельности: со временем дети взаимодействовали с роботом свободнее и требовали меньше подсказок даже при низком уровне речи.


Технология, эффект и следующий шаг
Ключевое обновление — интеграция большой языковой модели Google Gemma2-9b-it через Groq API. Это добавило адаптивность в реальном времени: робот мог перефразировать вопросы, отвечать по контексту, менять уровень сложности по реакции ребёнка и плавно переключаться между казахским и русским (включая код-свитчинг, распространённый в двуязычных семьях). Средняя задержка ответа оставалась менее 2 секунд, распознавание речи превышало 90% при чёткой речи, а детекция голосовой активности сократила лишние обращения к API примерно на 60%.
Робот показал надёжность: без сбоев, стабильная двуязычная работа, а мультимодальное взаимодействие (голос + мимика + жесты) удерживало внимание детей с разным уровнем навыков. Пять первых сценариев протестировали и доработали; теперь готовы десять полноценных AI-усиленных версий. Кодовая база документирована и ведётся под контролем версий для дальнейшего масштабирования.
Чтобы сделать решение применимым в реальной терапии, была создана отдельная веб-платформа QTrobot для детей (qtrobot-app.vercel.app). Она помогает отрабатывать социальные, эмоциональные и когнитивные навыки через короткие структурированные сессии под руководством робота, делая терапию более вовлекающей, более стабильной и более масштабируемой. Приложение даёт простой интерфейс для запуска сценариев, управления логикой взаимодействия и двуязычной подачи (казахский/русский), чтобы дети могли учиться в естественной для семьи языковой смеси.
Почему дети «раскрывались» и что дальше
Социальные роботы дают то, что человеческий ресурс не всегда обеспечивает в условиях ограничений: бесконечное терпение, идеальную повторяемость и (теоретически) доступность 24/7. Для Казахстана, где есть и территориальная разобщённость, и дефицит специалистов, робот становится «мостом», расширяя охват терапии, но не заменяя человека.
Остаются вызовы: тонкая настройка ИИ для детей с очень низкой речевой активностью или высокой отвлекаемостью, учёт культурных нюансов в сценариях и проверка долгосрочного эффекта в более крупных исследованиях. Но результаты пилота уже значимы: 20 детей успешно прошли программу, двуязычная реализация подтверждена, базовые данные собраны, протоколы для терапевтов сформированы, а клинически безопасная AI-робот система подготовлена к более широкому внедрению.
В реабилитационных кабинетах Астаны QTrobot становится не гаджетом, а «компаньоном», который помогает детям тренировать социальный мир — одно дружелюбное «привет» за раз. Если тенденции подтвердятся в следующих исследованиях, социальная робототехника может незаметно изменить то, как мы поддерживаем скрытую когнитивную сторону ДЦП: не только более сильные ноги, но и более крепкие связи с окружающими людьми.

https://link.springer.com/article/10.1186/s12984-025-01852-0