
Когда реабилитация плеча встречается с умной робототехникой: что 32 исследования говорят о новой волне восстановления после инсульта - систематический обзор
Инсульт остаётся одной из ведущих причин стойких нарушений функции верхней конечности. Традиционная реабилитация ограничена высокой ресурсозатратностью, неоднородностью проведения и низкой масштабируемостью. Ранние роботизированные системы типа end-effector показали пользу для дистальных задач (запястье/кисть), однако часто недостаточно учитывают сложную многосуставную динамику плечевого пояса. Носимые экзоскелеты, согласованные с анатомическими осями суставов, потенциально дают преимущества: они позволяют оказывать целевую, сегмент-специфичную помощь (плечо, предплечье, кисть) и снижать патологические синергии. Данный систематический обзор обобщает сенсорные технологии, методы привода и стратегии управления в экзоскелетах, ориентированных на плечо, с акцентом на клиническую трансляцию и применимость.
По протоколу PRISMA был проведён поиск в базах PubMed, Web of Science, Scopus, ScienceDirect и IEEE Xplore (англоязычные публикации, 2015 — апрель 2025). В фокусе были экзоскелеты для реабилитации верхней конечности/плеча; исследования по нижним конечностям, промышленным устройствам или не клинической направленности исключались. Первичная выборка составила 19 052 записи; после фильтрации и удаления дубликатов — 1 178; после исключения по тематике — 248; по итогам полнотекстового скрининга в критерии включения вошли 32 высококачественных исследования (преимущественно клинические испытания или продвинутые прототипы).
При извлечении данных ключевые элементы классифицировались по направлениям: типы сенсоров (ЭМГ, IMU, сила/момент, кинематические, мультимодальные), подходы управления (силовое/адмиттанс-управление, адаптивное assist-as-needed, human-in-the-loop, пассивная/гравитационная компенсация, прогнозирование на основе ML), тип привода (моторный, кабельный, пассивные пружины, мягкая пневматика), целевые сегменты (только плечо или вся верхняя конечность) и клинические метрики (тип участников, размер выборки, показатели Fugl-Meyer/ARAT/ROM, условия проведения). Риск систематической ошибки оценивался инструментом ROBIS независимыми рецензентами.

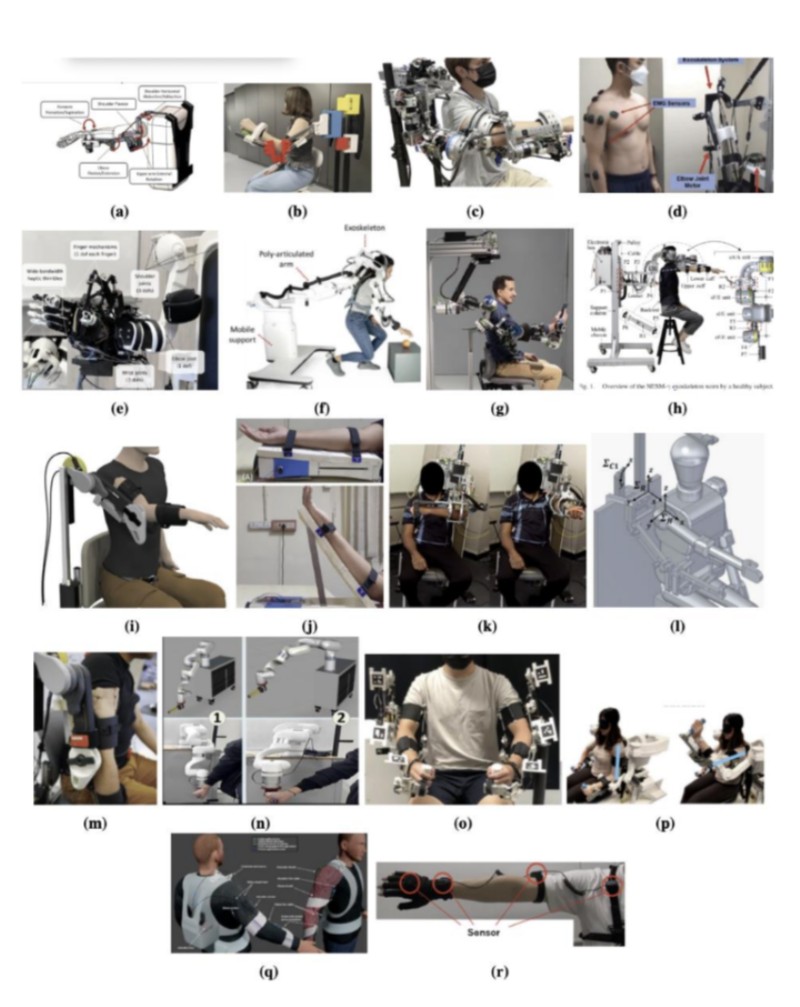
Сенсорные подсистемы преимущественно включают ЭМГ для мониторинга мышечной активации (например, в CASIA-EXO, NESM-γ), IMU для отслеживания ориентации/угловой скорости (часто в сочетании с энкодерами/камерами в xArm-5, POWERUP), датчики силы/крутящего момента для обеспечения комплаентного взаимодействия (AGREE, BiEXO, ULIX — также для выявления синергий), а также кинематические энкодеры/потенциометры для точной обратной связи по траектории. Мультимодальное объединение (ЭМГ + IMU + сила) выглядит наиболее перспективным для устойчивых интерфейсов человек-робот в реальном времени (ULIX, ANYexo, Quaternion Shoulder Exoskeleton), хотя и повышает сложность синхронизации и обработки данных.
Клиническая доказательность пока ограничена: в 21 исследовании участвовали здоровые добровольцы для базовой оценки безопасности и функциональности (например, прозрачность NESM-γ, универсальность AGREE, адаптация CASIA-EXO). Лишь два контролируемых исследования (20 пациентов/8 недель; 12 пациентов/10 дней) показали превосходство по подвижности плеча/локтя, уменьшение боли и патологических синергий, а также функциональные улучшения по сравнению с традиционной терапией. По приводам доминируют электродвигатели (19 из 32 систем) благодаря точности и совместимости с продвинутыми методами управления; кабельные конструкции обеспечивают комплаентность, но часто ограничены по моменту; пассивные и мягкие приводы повышают безопасность на ранних этапах восстановления.

Среди ключевых вызовов — шум/дрейф биосигналов, вариативность пациентов и утомляемость, стоимость и габаритность систем, регуляторные барьеры (CE/FDA), а также недостаток высококачественных рандомизированных клинических исследований (RCT). В качестве будущих направлений выделяются ИИ/глубокое обучение для прогнозирования намерений, полностью носимые/беспроводные сенсоры, мягкие экзокостюмы, замкнутые контуры нейрореабилитации (включая интеграцию ФЭС), а также более крупные стандартизированные исследования, чтобы перевести лабораторные прототипы в рутинную клиническую практику.
В заключение, сенсор-управляемые плечевые экзоскелеты обладают высоким потенциалом для персонализированной и интенсивной терапии, недостижимой традиционными методами. Наибольшие перспективы даёт мультимодальная сенсорика в сочетании с адаптивным/ML-управлением, однако для преодоления текущих технических, экономических и доказательных барьеров необходима более широкая клиническая валидация, чтобы обеспечить масштабируемый эффект в восстановлении верхней конечности после инсульта.
